publications
2025
-
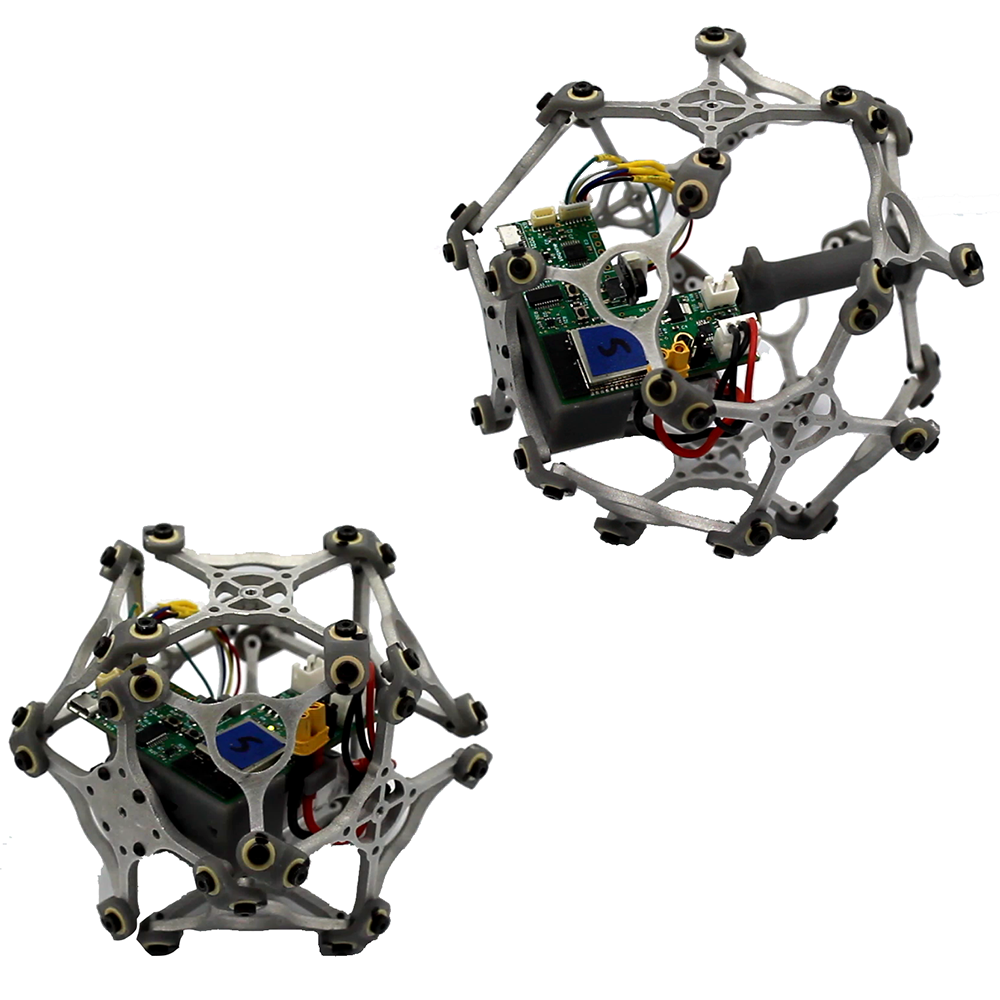
 Large-Expansion Bi-Layer Auxetics Create Compliant Cellular MotionLillian Chin , Gregory Xie , Lipton Jeffrey , and Daniela RusICRA, 2025
Large-Expansion Bi-Layer Auxetics Create Compliant Cellular MotionLillian Chin , Gregory Xie , Lipton Jeffrey , and Daniela RusICRA, 2025There is significant interest in creating compliant modular robots that can change their volume. Inspired by how biological cells move, these systems can potentially combine the resilience of modular robotics with the increased environmental interactions of soft robotics. However, current versions have limited speed, expansion, and portability. In this paper, we address these concerns through AuxSwarm, a compliant system composed of auxetic-based robotic voxels. These voxels control their volume through a scissor-like bi-layer auxetic design, growing up to 1.57 times their original size in 0.2 seconds. This combination of speed and expansion is unique across modular soft robots, enabling dynamic locomotion capabilities. We characterize the voxels and demonstrate the versatility of this approach through case studies of 2D bending and 3D cube flipping. AuxSwarm provides a first step towards addressable voxel-based smart materials, while simultaneously addressing the robustness and actuation challenges faced by soft robots.

2024
-
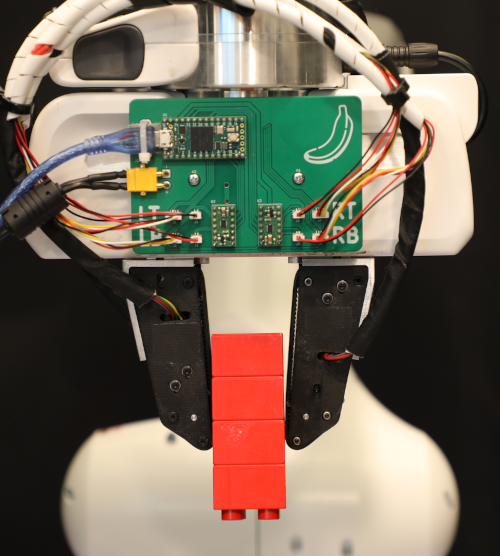
 Strong Compliant Grasps Using a Cable-Driven Soft GripperGregory Xie , Lillian Chin , Byungchul Kim , Rachel Holladay , and Daniela RusIROS (Oral Presentation), 2024
Strong Compliant Grasps Using a Cable-Driven Soft GripperGregory Xie , Lillian Chin , Byungchul Kim , Rachel Holladay , and Daniela RusIROS (Oral Presentation), 2024The natural flexibility of soft robotic grippers allows for versatile and compliant grasping. However, this same flexibility can restrict the gripper’s strength. Striking a balance between compliance and strength is essential for effective soft grippers. In this work, we present Flexible Robust Observant Gripper (FROG), a soft gripper that is both compliant and strong. We describe the mechanical design of the gripper and characterize the soft flexures used in the design. Utilizing the structure of the gripper, we develop feedforward grasp controllers and a classifier to distinguish between grasp types. Grasping experiments show that FROG can effectively grasp a variety of objects, including very soft or delicate items. Holding force tests show that our gripper can conform to the grasped object and exert large grasp forces.
-
 In-Hand Manipulation With a Simple Belted Parallel-Jaw GripperGregory Xie , Rachel Holladay , Lillian Chin , and Daniela RusIEEE Robotics and Automation Letters, 2024
In-Hand Manipulation With a Simple Belted Parallel-Jaw GripperGregory Xie , Rachel Holladay , Lillian Chin , and Daniela RusIEEE Robotics and Automation Letters, 2024Many manipulation tasks require task-specific grasps that may initially be unavailable, requiring the robot to transition from grasp to grasp. Current approaches to in-hand manipulation often involve complex hardware or algorithms, which limits their use in real-world tasks. In this work, we present an integrated approach to in-hand manipulation through Belt Orienting Phalanges (BOP), maximizing gripper capability by considering both hardware and algorithm design. BOP is a parallel-jaw gripper where each finger has two sets of belts. Together, the two fingers’ belts can impart forces and torques on to a grasped object to control its roll, pitch and translation. These movements form the basis of motion primitives that can be sequenced together for in-hand manipulation of objects as well as for complex motions such as syringe actuation and fingernail-style lifting. We characterize these motion primitives, develop a grasp-to-grasp motion planner, and demonstrate the potential of BOP through the real-world example of screwing a light bulb into a socket.


2023
-
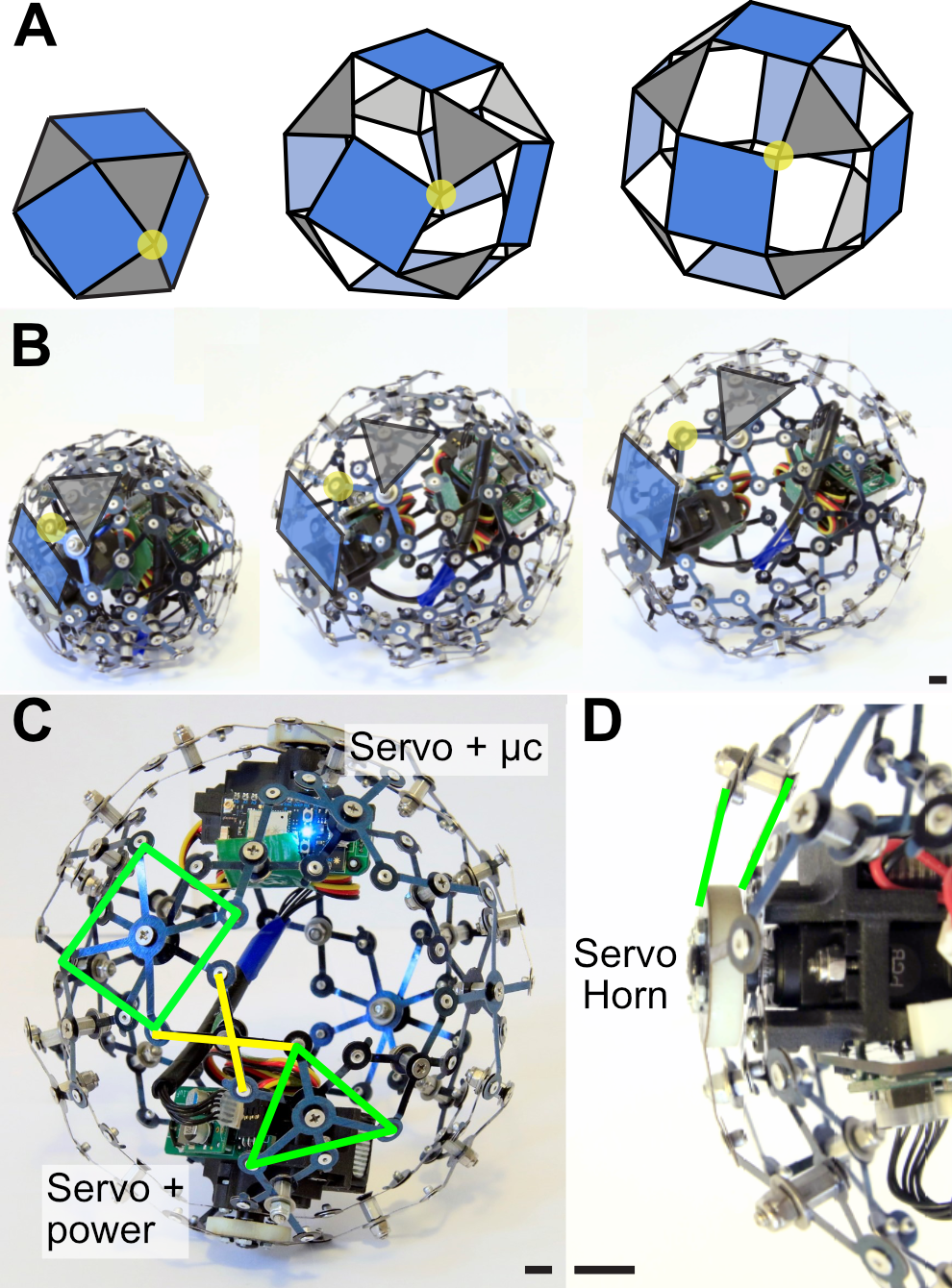
 Flipper-Style Locomotion Through Strong Expanding Modular RobotsLillian Chin , Max Burns , Gregory Xie , and Daniela RusIEEE Robotics and Automation Letters, 2023
Flipper-Style Locomotion Through Strong Expanding Modular RobotsLillian Chin , Max Burns , Gregory Xie , and Daniela RusIEEE Robotics and Automation Letters, 2023Volume-changing robotic units presents an exciting pathway for modular robotics. However, current attempts have been relatively limited, requiring tethers, complex fabrication or slow cycle times. In this work, we present AuxBots: an auxetic-based approach to create high force, fast cycle time self-contained modules. By driving the auxetic shell’s expansion with a motor and leadscrew, these robots are capable of expanding their volume by 274% in 0.8 seconds with a maximum strength to weight ratio of 76x. These force and expansion properties enable us to use these modules in conjunction with flexible wire constraints to get shape changing behavior and independent locomotion. We demonstrate the power of this modular system by using a limited number of AuxBots to mimic the flipper-style locomotion of mudskippers and sea turtles. These structures are entirely untethered and can still move forward even as some AuxBots stall and enter a fault state, achieving the key modular robotics goals of versatility and robustness.
